Lnline News
Your current location:News >> Lnline News >> Browse
Welcome to the official website of Shanghai Jialang Industrial Co., Ltd.!
 Service Hotline:021-39191166
Service Hotline:021-39191166The competition of the robot body is extremely fierce. Recently, the best gear of the robot arm - the end jaw - was found to be a good direction. Foreign countries have already achieved a very advanced level, and there are not many domestic ones.
The jaw is a human hand
Just like a robotic arm, it mimics the human arm. The end jaws described in this article mimic the human hand, and the robotic arm + end jaws completely form the human arm.
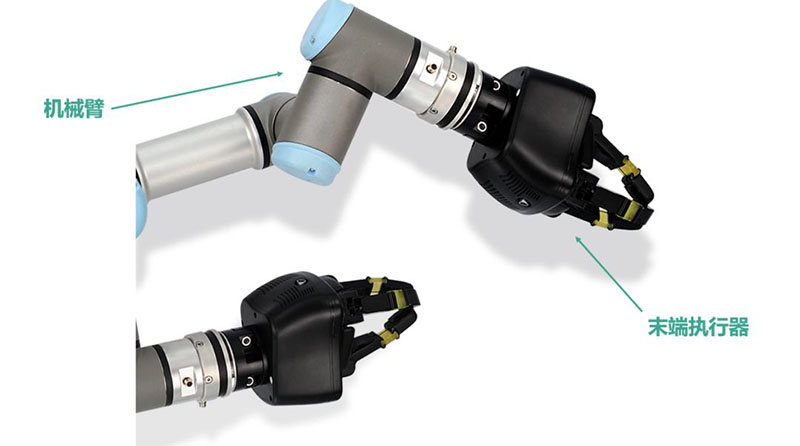
The gripper of an industrial robot, also known as an end effector, is a component that is mounted on an industrial robot arm to directly grasp a workpiece or perform a job, and has the function of gripping, transporting, and placing the workpiece to a certain position.
a wide variety of end jaws
From a morphological point of view, the jaws may have fingers like a human hand, such as a three-finger or five-finger product, or a palm without a finger, such as a parallel two-finger clip; it may be a humanoid gripper or a professional Working tools, such as spray guns, welding tools, etc. mounted on the wrist of the robot.
From the driving method, it can be divided into three types: hydraulic drive, pneumatic drive and electric drive.
Hydraulic end effector, convenient speed regulation, but high pressure, high system cost and troublesome maintenance.
Pneumatic end-effectors are the most widely used end-effectors in the industrial field due to their low cost and rich product models. However, the unstable output of the air supply pressure will result in insufficient clamping force, making the workpiece easy to fall off.
Electric end-effectors are superior in performance and construction to hydraulic and pneumatic end-effectors and are a trend in the future end-effector industry.
Compared with the pneumatic end effector, it replaces the air source, filter, solenoid valve and the like of the pneumatic end effector with an electric drive on the system structure. Compared to hydraulic end-effectors, the system is easy to maintain and requires no use of hydraulic energy to reduce energy pollution.
4 commonly used end effectors
Standard - vacuum suction cup

Generally, the air pump is used to suck the articles. According to the shape of the grabbed articles, the surface of the articles is required to be smooth and not too heavy, and the application scene is limited, which is generally the standard of the robot arm.

Mobile station